L'INVENTION

Gradual learning method of precision magnetic field control system controlling 3D position of micro/nano robot
A: Mécanique – Moteurs – Machines – Outillage – Procédés industriels – Métallurgie
L'INVENTION
- Nom de l'invention
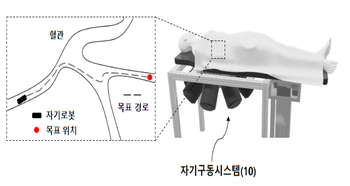
- Gradual learning method of precision magnetic field control system controlling 3D position of micro/nano robot
- Méthode d'apprentissage progressif du système de contrôle du champ magnétique de précision Contrôle de la position tridimensionnelle du micro-robot/nano-robot
description de l'invention
- Description
- Méthode d'apprentissage graduel pour le contrôle magnétique de précision de la position des micro/nano robots 3D. Contournant la modélisation complexe, en utilisant l'IA qui s'adapte à divers systèmes et conditions par le biais d'un réentraînement.
INVENTEUR·RICES

DGIST, DEPARTMENT OF ROBOTICS AND MECHATRONICS ENGINEERING
inventor 3601022120_2454
Les informations contenues dans ce catalogue en ligne sont basées sur les données reçues pour l'événement et mises à jour par le participant. Les inscriptions au catalogue relèvent de la seule responsabilité du participant. La direction du salon décline toute responsabilité pour d'éventuelles erreurs ou omissions.