THE INVENTION

Gradual learning method of precision magnetic field control system controlling 3D position of micro/nano robot
A: Mechanics – Engines – Machinery – Tools – Industrial processes – Metallurgy
THE INVENTION
- Name of invention
- Gradual learning method of precision magnetic field control system controlling 3D position of micro/nano robot
- Méthode d'apprentissage progressif du système de contrôle du champ magnétique de précision Contrôle de la position tridimensionnelle du micro-robot/nano-robot
Invention description
- Description
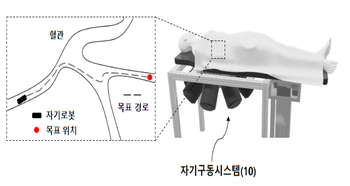
- Gradual learning method for precision magnetic control of 3D micro/nano robot position. Users bypass complex modeling, using AI adaptable to various systems and conditions through re-training.
INVENTORS

DGIST, DEPARTMENT OF ROBOTICS AND MECHATRONICS ENGINEERING
inventor 3601022120_2454
Information in this online catalogue is based on data received for the Event and updated by the participant. Catalogue entries remain the sole responsability of the participant. The show management declines all responsibility for any possible errors or omissions.